
The FAA’s Population Categorization Framework for Proposed Part 108
The FAA’s Population Categorization framework is based on the data collected by LandScan, an ongoing population study database managed by Oak Ridge National Labs. The framework is fairly restrictive and, while the FAA’s population categorization system in Proposed Part 108 works well for states west of the Mississippi, and makes sense when evaluating risks of flights that operate above 100’ AGL, such as traditional Package Delivery flights which spend the majority of their operating time transiting 3rd-party properties. For agricultural operations, where drones are operating within 25-50 feet AGL at most, and transiting single-owner farmland instead of third-party properties, the population density has far less significance, as a drone 20-30 feet above the ground self evidently has functionally no risk of traveling far enough as it falls out of the sky to hit a house or a person on a separate property.
Further, agricultural drones represent the potential for a massive advancement in farmer safety, especially in the more mountainous areas of the United States. These regions, definitionally, have more overlap mile-to-mile between farms and people, leading to population densities that would violate the population density categories for proposed operations, while functionally being quite safe for agricultural use, which functionally occurs within 25-50 feet of the ground.
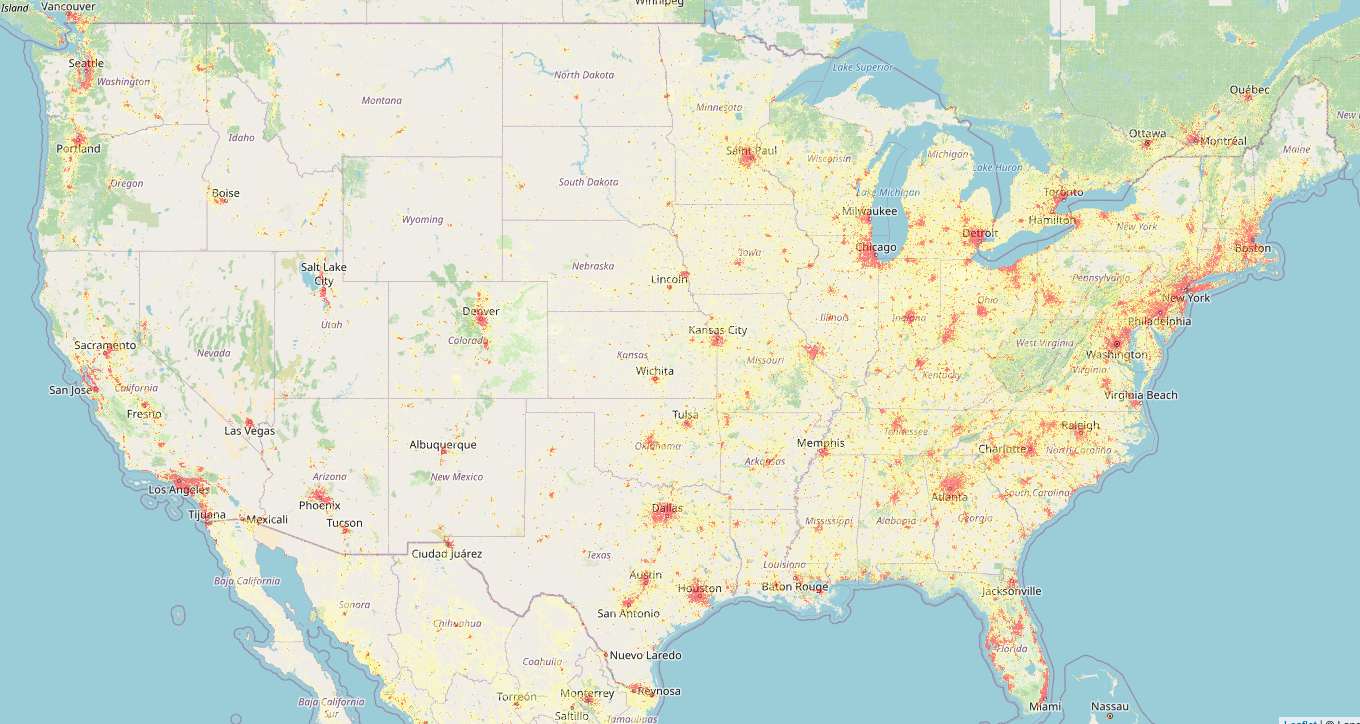
The U.S. As Viewed on the LandScan Database
The FAA’s Population Density Categories are as follows and rely on the LandScan Database as a reference for density assessments.
Population Density Category 1
This is the lowest-density category, defined as being more than 1 statute mile from any area with 10 or more people. Operations in this category have the fewest mitigation requirements. It's intended for flights in areas with very few to no people, but it also serves as a default for any operations that don't meet the requirements for the other categories. As a result, this category is the most restrictive in terms of where flights can occur.
Population Density Category 2
This category covers low-density areas like rural or farming regions where a few people might be present. It is defined as being within 1 statute mile of a location with 10 or more people. Because of the increased risk to people on the ground, a new mitigation is required: drones cannot use radio frequency devices that are susceptible to harmful interference for their command-and-control (C2) systems. This is because interference from common electronics, which are more prevalent in populated areas, could prevent the drone from staying in its intended flight path.
Population Density Category 3
This category includes moderate-density areas like suburban developments and single-family homes, defined as being within 1 statute mile of a location with 25 or more people. Operations such as package delivery are expected to be more common here. A key new mitigation is added: the requirement to use a strategic deconfliction capability. This involves reserving a flight path segment for a specific period of time to prevent collisions with other drones, which in turn reduces the risk of harm to people on the ground.
Population Density Category 4
This category covers higher-density areas such as shopping centers and multi-family housing, defined as being within 0.5 statute mile of a location with 100 or more people. Because of the increasing risk, operators are now required to obtain an operating certificate. This involves a rigorous FAA evaluation of the operator's manuals and procedures and requires ongoing FAA surveillance to ensure safety standards are continuously met.
Population Density Category 5
This is the highest-density category, encompassing major metropolitan downtown areas and defined as being within 0.5 statute mile of a location with 2,500 or more people. In this highest-risk environment, a new, critical mitigation is required: the drone must be equipped with a Detect and Avoid (DAA) system. This system must not only detect and avoid other aircraft but must also be able to detect all aircraft, including those not broadcasting their position. This is to ensure that in the event of an airborne collision, the risk of debris falling on a densely populated area is greatly reduced.